Align perfectly. Then go forward. Slowly. No deviations! And if the way is blocked, keep your direction and go back to where you came from.

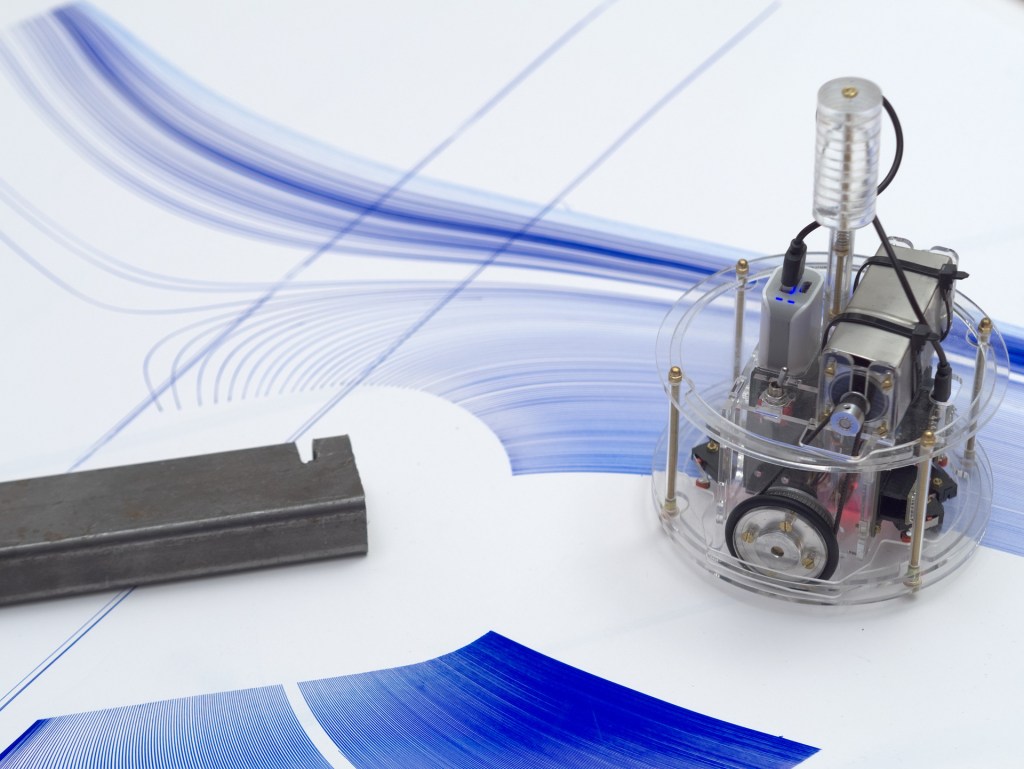
The little drawing machine in “straight! (back)” tries its best to drive a straight line, in its subjective sense of orientation. The direction is given by an electronic compass mounted between its wheels. A pen in its center leaves a mark in on the ground, while the interplay of electronic observation, decision making and locomotion determine a path in response to the outer stimuli and inner disturbances.
The resulting drawing resembles a map of the world as experienced by the machine, the hatching pattern of nearly parallel lines a result of its inability to fulfill its programmatic task perfectly, accumulating drift in space caused by the impossibility to ever return to the initial state by walking backwards in a universe full of electrical noise, mechanical frictions and computational imprecisions.

As such, the lines left behind are at the same time a painting of a magnetic landscape, and a testimony of the inner workings of a mechanical traveler.